As part of the 6G-life research project, the focus is on the construction and use of testbeds and the development of innovative demonstrators. These test environments offer unique opportunities to test and further develop pioneering technologies that pave the way to a networked and digital society. The overview of all testbeds and demonstrators realized in the 6G-life project provides an insight into their functionalities and applications.
47
Demonstrators
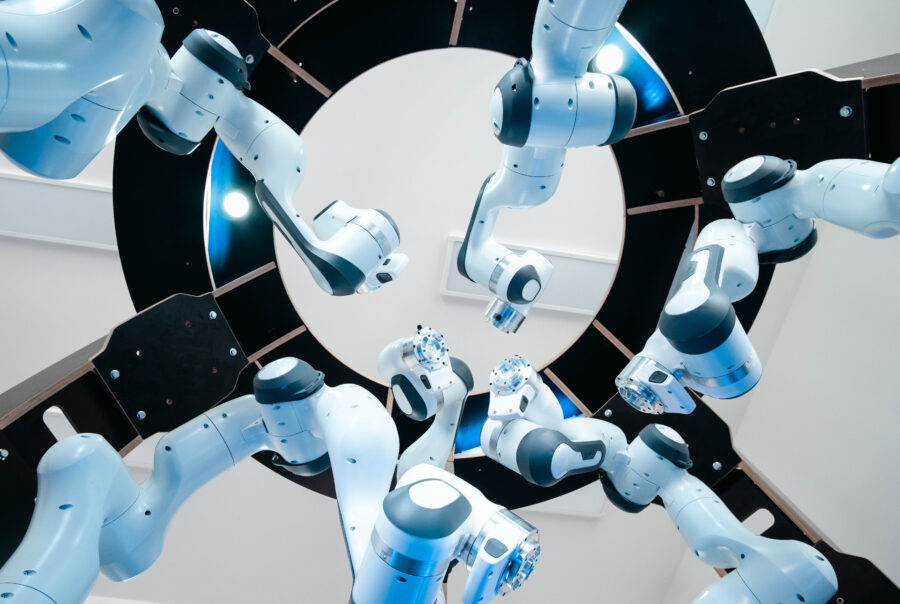
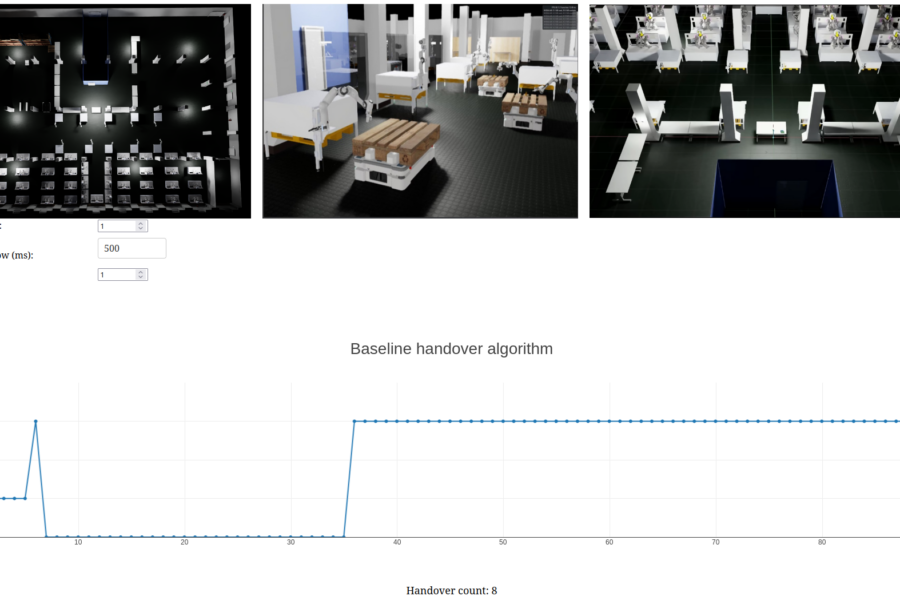
RoboSphere
The Robosphere demonstrates the potential of state-of-the-art algorithms for multi-robot coordination. It gives an impression of what future facilities could look like: less space, high robot density.
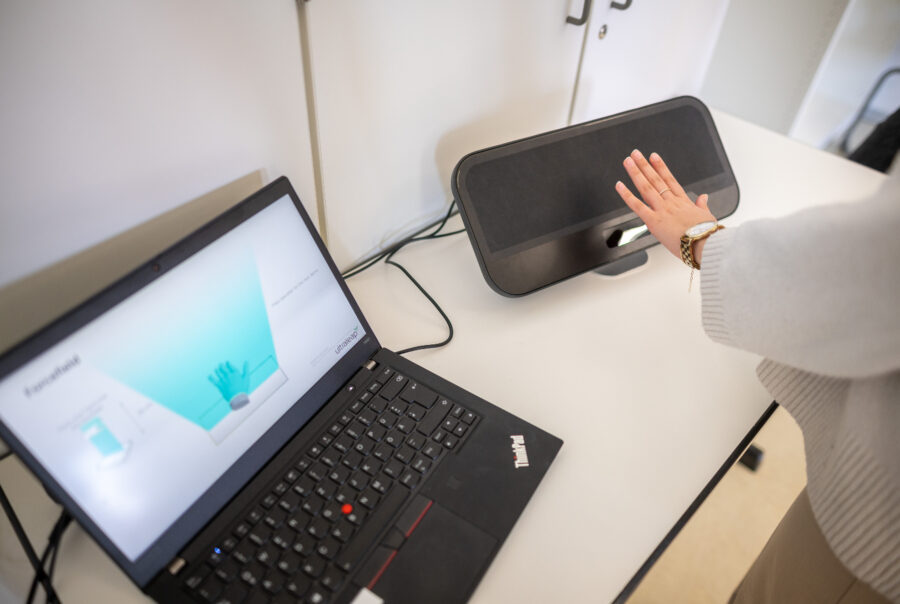
Haptic Ultrasound
The aim is to demonstrate touchless haptic control in a virtual environment, e.g. tactile cues on physical objects or force feedback under a palm for dynamic conditions.

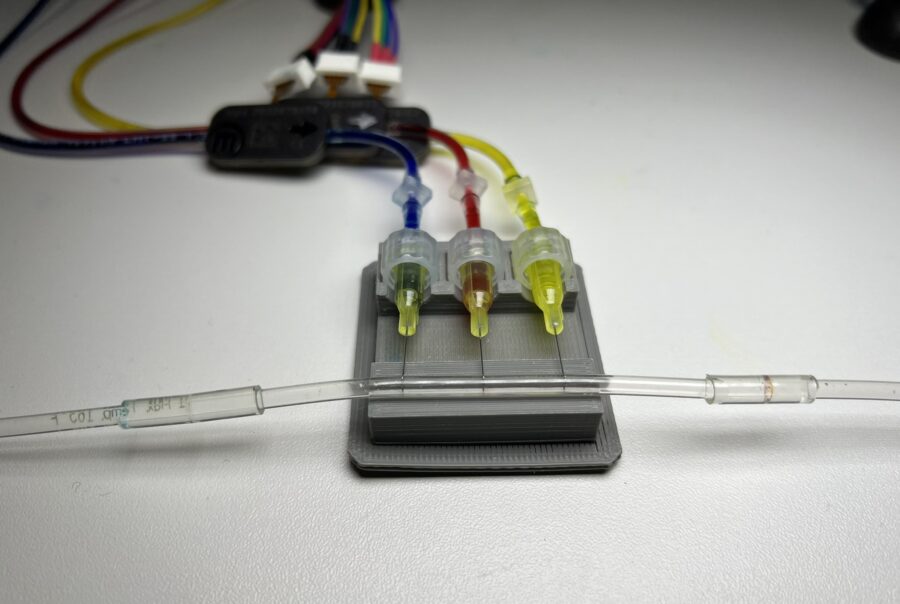
Molecular Communication
This demonstrator shows that it is possible to use molecules for communication. A transmitter modulates and encodes the information in the concentration of an ethanol alcohol solution. The receiver demodulates and decodes the received ethanol alcohol by measuring the concentration of the ethanol alcohol solution on the receiver side.

Negative Latency
The predictability of human intentions can be revealed by analysing grasping movements. Hand movements play a crucial role in conveying important information about the underlying intention, such as the object to be grasped and higher-level actions associated with that object, such as its intended use.

Glove Game
The demo aims to illustrate how the control and interactive management of virtual reality is made possible by intelligent clothing, such as an interactive glove. In a gamification environment, the demo allows the player to move through two different virtual worlds, controlled solely by gestures performed with the glove. The glove utilises high-precision motion sensors to capture hand movements in real time and seamlessly transfer them into the virtual world.

EndoMersion
EndoMersion is a scientific prototype for the development and testing of methods for intuitive and immersive tele-robotic control of a surgical camera (laparoscope) attached to a robotic arm via the movement of the head with simultaneous display of 3D images on a head-mounted display.

Quantum Device Simulation Software
The field of novel quantum technologies encompasses an impressive variety of different systems. However, it is often a major challenge to apply these technologies at an early stage, as expertise from different disciplines must be combined in innovative ways to translate quantum phenomena into practical solutions.
Our QuReed software offers a standardised platform for describing, visualising and linking this complexity. It integrates state-of-the-art control technology and enables a precise connection between quantum mechanical processes and technical applications. In combination with Photon Weave, which enables precise and efficient simulation of the behaviour of devices and systems, it provides researchers in the fields of technology and physics with a sound basis for planning quantum experiments, field tests and demonstrations in a targeted and efficient manner.

Juggling Demo
6G-life makes it possible to connect a teacher and a student remotely to teach complex motor skills such as juggling in a metaverse environment. By combining a highly interactive XR representation of juggling with a low-latency haptic soft glove interface, we can accurately replicate real-world interaction. Unlike the real world, in the metaverse we can control the environment, such as the speed of the balls, and therefore also gradually control the level of difficulty.
Telemedical Examination and Patient Monitoring in Shared 6G Network Testbed
The testbed showcases two pioneering medical applications: the semi-autonomous examination suite and context-sensitive patient monitoring. Both solutions utilise the possibilities of the 6G network and its integrated processing functions.

Touch Transmission System
The demonstrator shows how affective touch can be transmitted over distance. Touch patterns can be input on a wearable sensor array and reproduced on a remote actuator wristband using the haptic phantom illusion.
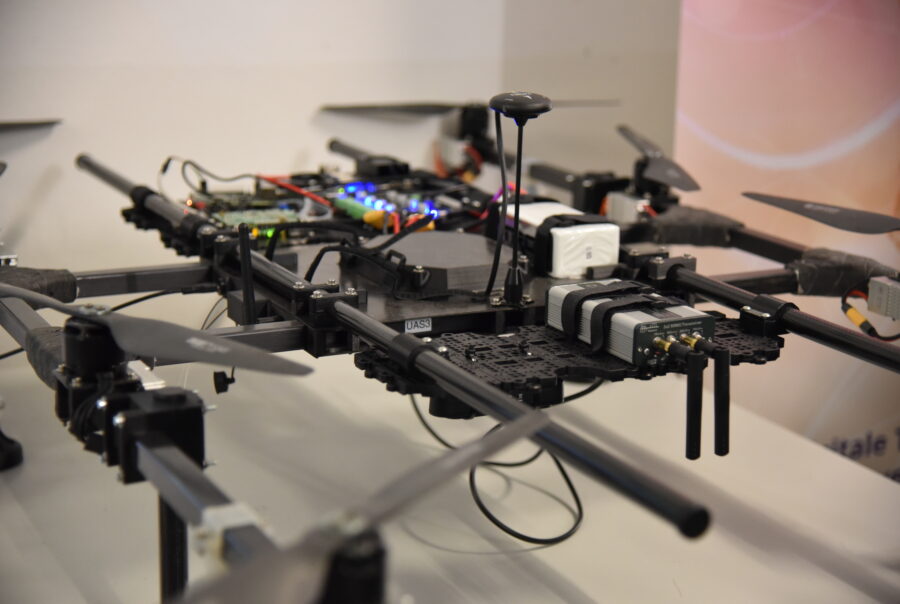
JCAS From the Sky
The simulation demonstrates how a drone can increase the functionality and efficiency of 6G networks by capturing and transmitting environmental data in real time while following a flexible mission plan.
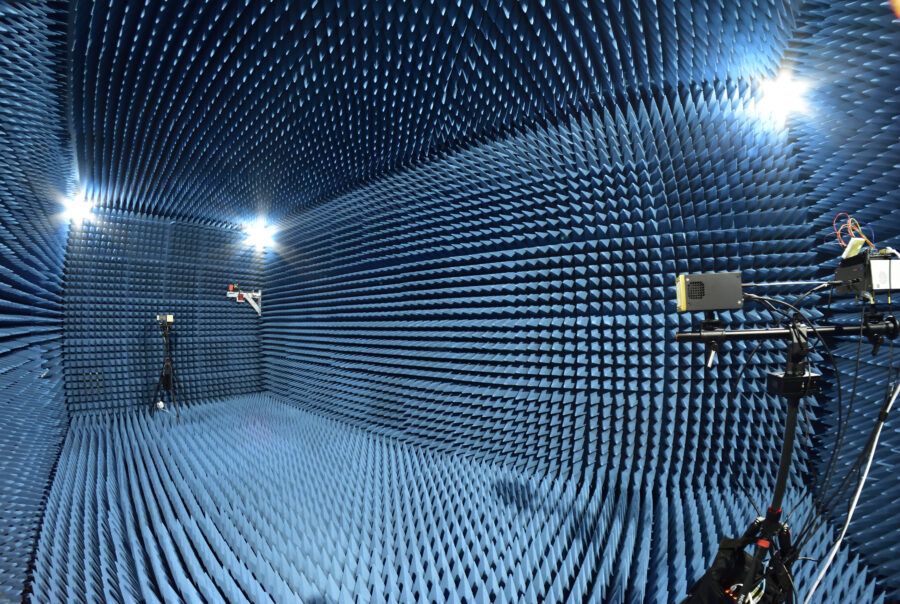
mmWave Physical Layer Security
Safety is demonstrated at the physical level in the mm-wave frequency range.

Semantic traffic filtering for robust control
It shows that network- and application-based semantic filtering at the transport layer can ensure the stability of real-time control loops even when they are operated over an overloaded wireless network.

Digital Twin-enabled Seamless Connectivity
The demonstrator illustrates how 6G enables reliable connectivity for industrial robots by using environmental data from a digital twin to dynamically switch between LiFi and RF, preventing loss of communication when obstacles such as larger robots block access to a technology.

RGB-D Recording and Evaluation of Robot-Assisted Surgery
RGB-D images of operations are shown and illustrate how this can improve robot-assisted surgery.

Testbed Infrastructure for Reproducible 5G/6G Measurements
The demo presents a test environment that enables reproducible measurements. As part of this demonstration, an experiment is carried out that examines a packet processing system and precisely measures hardware timestamps in the nanosecond range.

Famous 8
The demonstrator shows the process communication between different moving objects and the predictability of their movements with URLLC connectivity, which can be achieved through wireless multipath communication.

EIT-Sleeve for motion profiling – Partner: Enari
A portable system is presented that enables precise monitoring of muscle activity and the creation of detailed movement profiles. Video recordings, electrical impedance tomography and myography are combined in an innovative way.

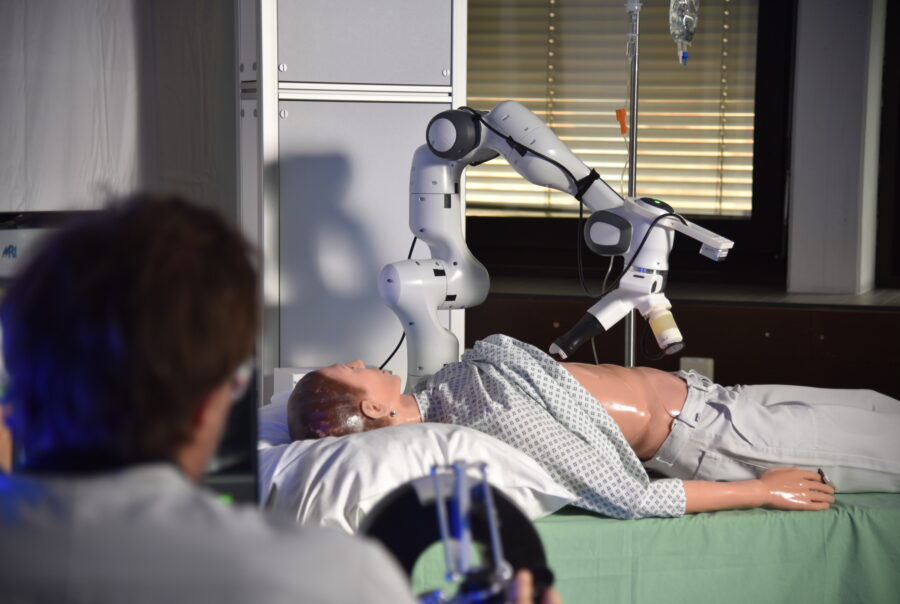
Tele-surgical platform at MIRMI
The MIRMI telesurgery platform consists of a patient station, complemented by robots around the bed, and a doctor’s station with haptic consoles. With this innovative platform, we aim to research and optimise the performance of tactile remote diagnosis under different (wireless) communication conditions.

AI-assisted Load-aware Service Migration in 6G Edge Networks
Reduction of processing overloads and high latencies caused by user mobility and load fluctuations with the help of AI-supported, load-adaptive service migration (LIS & LDV).

Touch the Metaverse: Demonstration of Haptic Feedback in Network-Assisted Augmented Reality
Demonstration of haptic feedback in network-supported augmented reality (AR).

Electrical Nose
Demonstration of odour recognition using an electric nose based on nanomaterials.
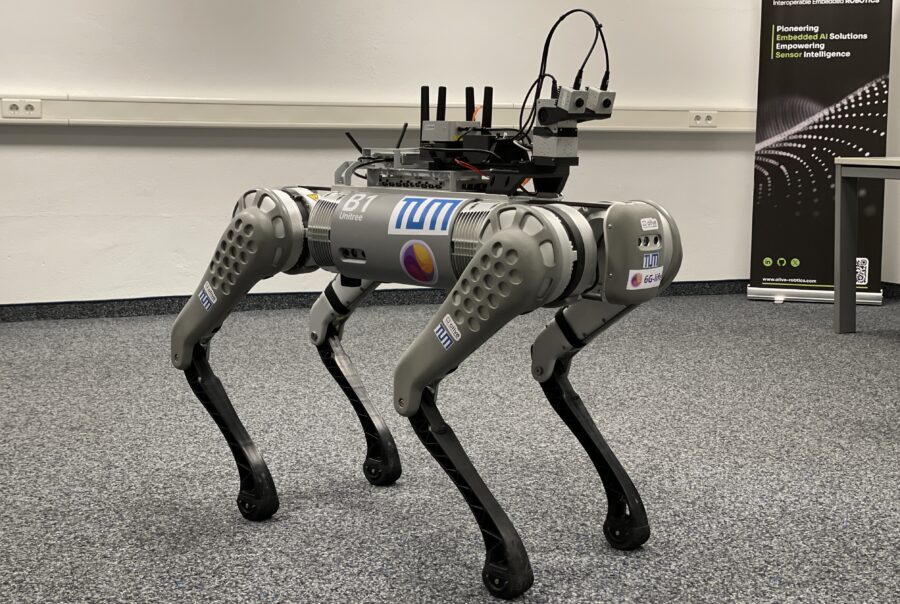
Teleoperated mobile sensor platform based on modular robotics components
An advanced, interoperable, embedded sensor system mounted on a legged robotic platform that enables immersive teleoperation. Precise remote control is ensured by transmitting low-latency sensor data via a 5G communication network operated by Olive Robotics.
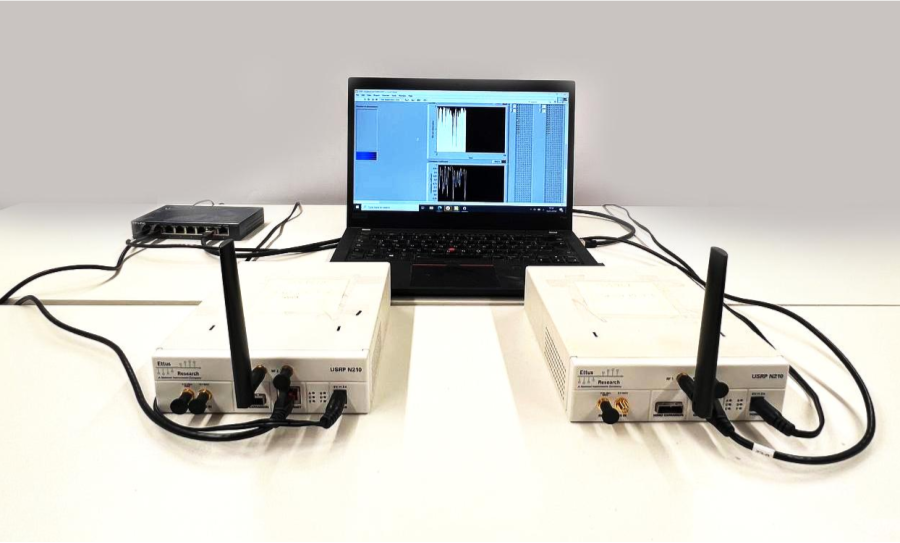
Improving Common Randomness rate using Software Defined Radios
A novel filter design is used to show how common randomness (CR) – a key resource for future communication systems – can be generated almost at capacity level.

Adaptive Energy-efficient Computing for Controlling Applications in Network-assisted Driving
This demonstration shows adaptive and energy-efficient control of self-driving cars, made possible by the integration of network-internal data processing.

Wireless Exoskeleton Control – Influences of Communication Networks
This demonstration of a wirelessly controlled elbow exoskeleton impressively illustrates how communication networks can significantly influence the performance of robotic systems.

NeuroWireless: Power-Efficient Neuromorphic Algorithms for Wireless Signal Processing
We investigate the potential of neuromorphic computing to save energy and power by comparing the innovative, lightweight Spinnaker2 board with an embedded NVIDIA GPU.
Post-Shannon Communications
An implementation of randomised and deterministic identification codes is shown here.

Robot Teleoperation over 5G/6G networks
6G QoS-aware resource management and intelligent network slicing create reliable, low-latency communication that meets the demanding requirements of medical robots.
Molecular Communication Testbed based on Spectral Sensing
This 6G-life testbed opens up new dimensions in real-time molecular communication. It uses coloured particles and spectral scanning to explore multi-user and multi-molecule networks. It simulates endogenous channels such as blood vessels to advance the development of biocompatible communication systems. These systems are used for precise detection, recognition and treatment in the context of the future Internet of Bio-Nano-Things and thus open up promising perspectives for innovative medical applications.

Robot Teaching via Teleoperation
The demo presents a tele-teaching platform for teaching a complex, touch-intensive robotic skill – the placement of a rubber band. Bilateral teleoperation with haptic feedback under simulated delay conditions is used as a demonstration method. The robot uses these demonstrations to learn the task independently and then perform it autonomously.
Anomaly detection in 6G core networks
The demo illustrates the automatic setup of a 6G core network and the simulation of user devices. Attacks on the 6G core network are also demonstrated and their detection using temporal neural networks is shown.
Context-aware Mobility Management
The demonstrator shows the benefits of a context-aware approach to mobility management in wireless networks.

mmWave Radar-based Indoor Sensing
This demonstration shows the possibilities of indoor positioning and non-invasive environment perception using mmWave radar sensors.
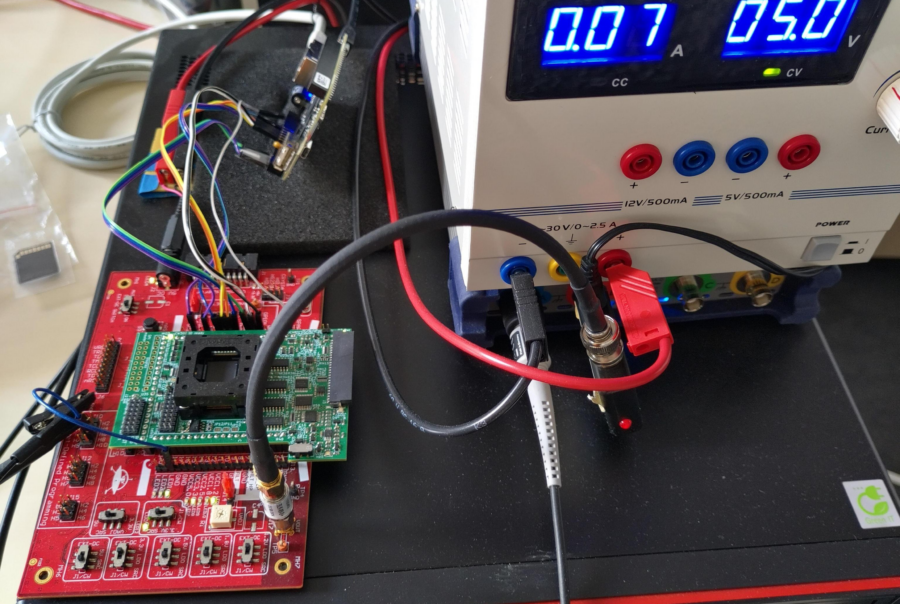
Circuit Sabotage: Demonstrating the Impact of
Hardware Trojan Attacks
Immerse yourself in our demonstration where you can log into our ASIC IoT microcontroller – even without the correct password. We show how cryptographic keys can be spied on and how tiny hardware implants can be used for targeted DoS attacks.

Cutting the Cord: XR Connectivity with LiFi
Experience seamless connectivity with our innovative VR headset that integrates both LiFi and WiFi technologies to enable ultra-fast data transfer with minimal latency. Enjoy enhanced virtual reality performance that combines the best of light and radio wave communication.
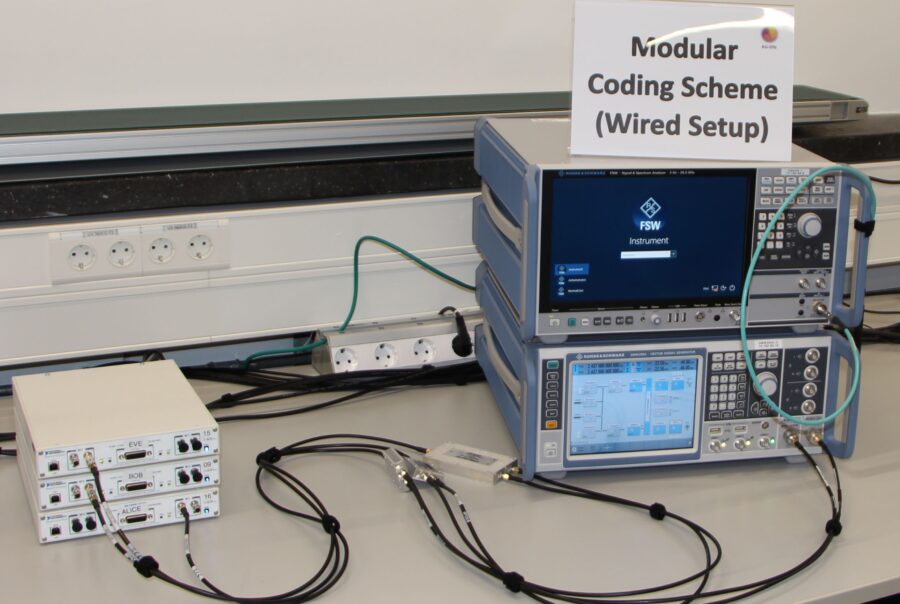
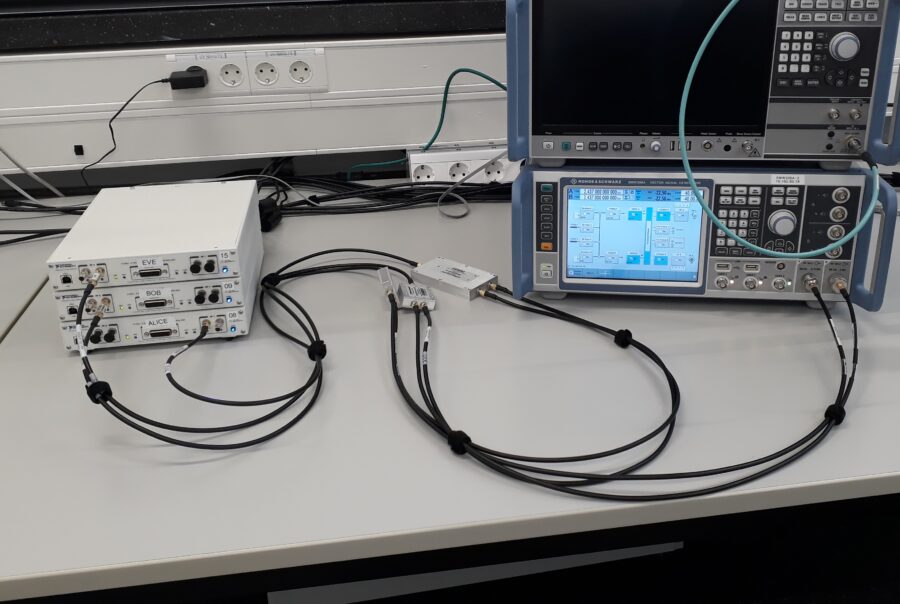
Physical Layer Security
This demonstrator illustrates the security of the physical layer in an eavesdropping channel by using a modular seeded coding scheme.
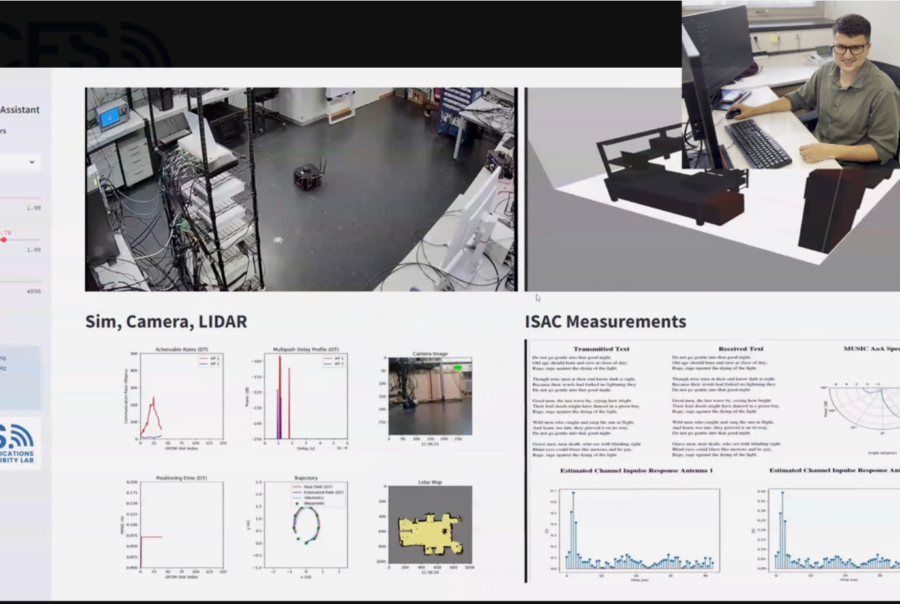
ComplAIn: Using AI to Talk to Industrial Robots, Simulations and Communication Equipment
We illustrate how modern LLMs can support the planning of experiments, the control of robots and the analysis of PHY layer data using natural language.
DTain: Monitoring and Controlling Robotic Fleets in Both Real and Digital Worlds
This demonstrator shows how AI and sensor-supported digital twins can significantly support the control of future industrial robots.
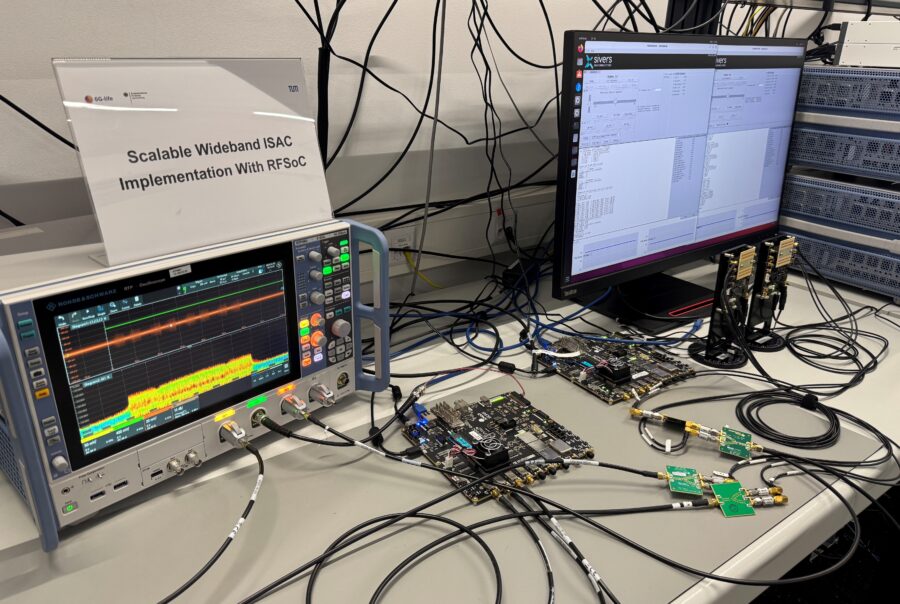
Scalable Wideband ISAC Implementation With RFSoC
We implement a scalable integrated wideband sensor and communication (ISAC) system with OFDM and FMCW signalling on RFSoC and demonstrate its performance in a highly mobile scenario using an FPGA-based channel emulator.

Technical Sovereignty – an end-to-end startup-product based 5G system
Three start-ups showcase an end-to-end 5G communication solution to demonstrate technology sovereignty in Germany

Dynamic Environmental Digital Twin
The demonstration impressively illustrates the model’s ability to accurately reconstruct the environment and adapt flexibly to changing conditions.
Joint Identification and Sensing

ACES Lab: Resilient-by-Design Split Federated Learning#
A sensing-assisted physical layer framework for resilient split federated learning with large language models over MIMO OFDM networks was created.

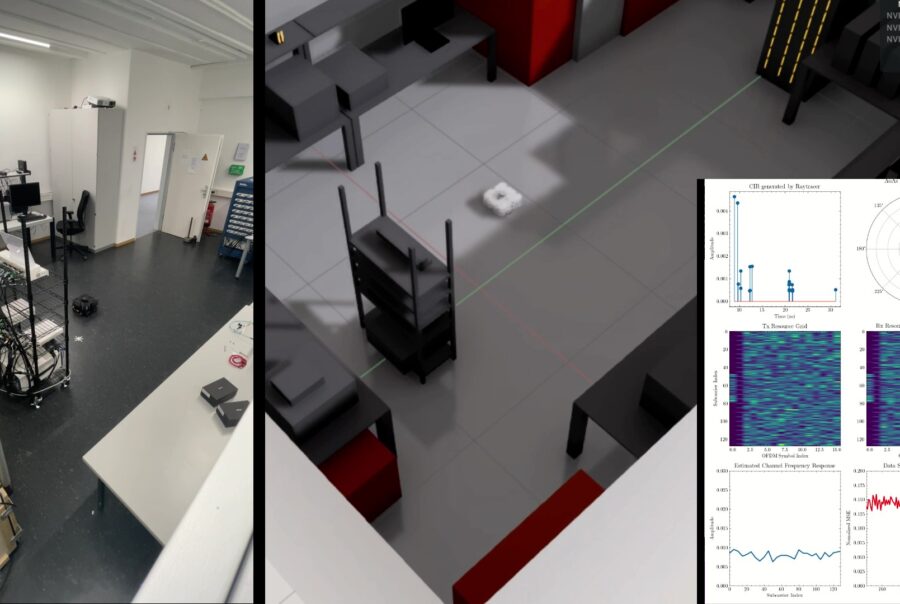
ACES Lab: Digital-Twin Assisted Integrated Sensing and Communications
A framework for joint communication and sensing (JCAS) was developed using digital twin and ray tracing technologies. It enables the integration of sensors and reactive updates triggered by changes in the environment.
ACES Lab: Demonstration of Post-Shannon Communication, Identification and Secure Identification
Identification as a post-Shannon communication scheme has impressively demonstrated that it can exponentially increase the number of receivers while saving radio resources in event-driven communication. In this demonstration, we have developed explicit code constructions for both randomised and deterministic identification schemes. Moreover, we were able to show that in an interference-prone environment, communication via deterministic identification works even when classical Shannon communication approaches fail. Furthermore, we have integrated information-theoretic secrecy into randomised identification schemes by using a modular coding scheme that seamlessly embeds semantically secure physical security into the system.
Telesurgery testbed for robot-assisted surgery: EndoMersion (NCT)
The robotic arm in Dresden can be controlled remotely using head movements recorded by VR goggles in Munich. This opens up new possibilities for remote surgical procedures and expert consultations.
